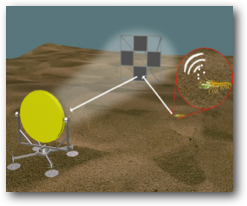
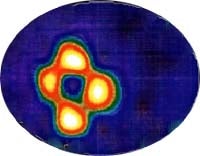
Initial work with data from a previous ANI camera (ADONIS) led to the development of acoustic daylight and higher-order statistical imaging. The key idea is to find image areas showing a contrast with the background in terms of the statistics, and to associate these areas with targets that may be reflecting ambient noise from a different direction and hence having different statistics. Tools such as Kalman filters were used to track targets through times when the acoustic “illumination” was not suitable for imaging.
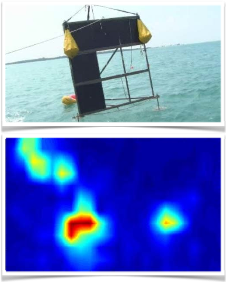
The noise made by snapping shrimp is compact in time, broadband, and highly impulsive. With a large number of these snaps arriving at a receiver, the generalized central limit theorem allows us to model the resulting pressure variation accurately using symmetric alpha-stable distributions. More recently, signal processing based on these distributions leads to ANI algorithms that utilize fractional low-order moments (FLOM) and fractiles. These algorithms yield more stable and consistent results, as compared with previously developed methods that employ energy estimates and high-order statistics.