The first instantiation of the above vision is in the form of a team of swans for fresh-water monitoring.
Spatial water quality monitoring of fresh water reservoirs is a slow and labor-intensive endeavor. In collaboration with NUS Environmental Research Institute (
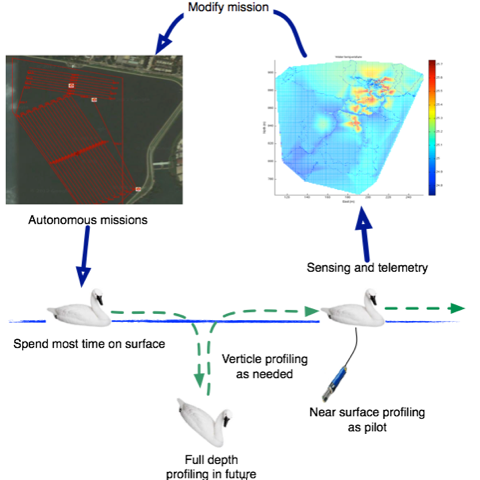
NERI [wp-svg-icons icon=”arrow-up-right-3″ wrap=”i” size=”70%”] ), we have been working on a system for monitoring of local reservoirs. The monitoring vehicles are dressed up as swans for aesthetic reasons. Importantly, they are designed to be safe and non-intrusive to the recreational activities that may be ongoing in the waters being monitored. Through interdisciplinary collaborations with fresh-water researchers, PUB, and sensor researchers, the platforms will be instrumented with a selected set of water quality probes. The measurements collected would be useful for management and decision support through data-driven modeling, forecasting and early detection of harmful events.
NUSwan has been featured in several
news articles.