

- Agent-based command and control [wp-svg-icons icon=”arrow-up-right-3″ wrap=”i” size=”70%”]: The command and control (C2) system of the STARFISH AUV is modeled on a typical naval command hierarchy. A software agent known as the “Captain” works closely with other agents such as “Executive Officer”, “Navigator”, “Signaling Officer”, “Safety Officer”, etc to safely execute complex missions. The current version of the C2 system (known as JC2) supports Java or Groovy agents that users can develop and introduce to the Captain, who then can work with them to make the AUV do new things.
- Obstacle detection and avoidance using scanning sonars: The STARFISH AUVs use a mechanically scanned forward-look sonar (FLS) for detecting obstacles. We can produce accurate online maps using the data from the FLS, and are now working on the development of an obstacle avoidance agent that uses these maps to advise the command and control system on how to avoid detected obstacles.
- Energy-efficient mission planning:
 Although shortest-distance mission planning is energy-efficient in calm waters, it may no longer be optimal if the AUV has to fight strong currents. If current and wind estimates or forecasts are available, the AUV mission planning algorithm may be able to use the currents and wind conditions to dramatically reduce energy consumption and thus enhance mission endurance.
Although shortest-distance mission planning is energy-efficient in calm waters, it may no longer be optimal if the AUV has to fight strong currents. If current and wind estimates or forecasts are available, the AUV mission planning algorithm may be able to use the currents and wind conditions to dramatically reduce energy consumption and thus enhance mission endurance. - Online system identification: The STARFISH AUV is piloted by a software agent known as Chucky. He understands the system dynamics of the AUV and implements various feedback control algorithms for pitch, yaw, roll and depth control. When the AUV dynamics change due to change in AUV configuration (e.g. change in payload), the agent has to be retrained. We are developing an online system identification method to automate the tuning, and to allow Chucky to learn the AUV dynamics adaptively during operation.
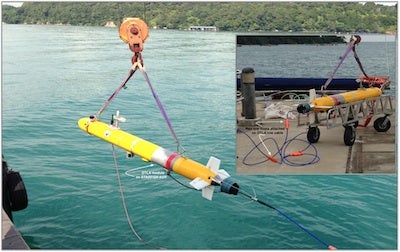
- Vectored thrust: The control fins are mechanically the weakest area of the STARFISH AUV. The protruding fins are also inconvenient for storage and transport. We are exploring the possibility of using integrated fin / thruster assembly, ducted thrusters or other forms of vectored thrusters to improve the reliability and ease of operations.
- Cooperative positioning [wp-svg-icons icon=”arrow-up-right-3″ wrap=”i” size=”70%”]: Underwater navigation of AUVs is a challenging task due to the unavailability of GPS signals underwater. Although accurate inertial navigation systems (INS) or Doppler velocity logs (DVL) help reduce the error of dead reckoning underwater, they are key cost drivers for AUV operations. We believe that a team of AUVs can cooperatively navigate accurately underwater even if many or all of the AUVs lack INS and/or DVL. To achieve this, we have developed and demonstrated cooperative underwater navigation algorithms for teams of AUVs with at least one AUV with INS/DVL. We are currently extending this work to teams where none of the AUVs carry an INS or DVL.
- Environmental monitoring:
 In collaboration with MIT, under the CENSAM [wp-svg-icons icon=”arrow-up-right-3″ wrap=”i” size=”70%”] program, we are exploring cooperative environmental monitoring using our STARFISH AUVs and other sensing platforms. Fixed platforms such as PANDAs and surface platforms such as autonomous kayaks may be used as communication and navigation gateways or as sensor nodes. Specially designed sensor and actuator payloads on !STARFISH AUVs may allow environmental surveys to be performed quickly and efficiently.
In collaboration with MIT, under the CENSAM [wp-svg-icons icon=”arrow-up-right-3″ wrap=”i” size=”70%”] program, we are exploring cooperative environmental monitoring using our STARFISH AUVs and other sensing platforms. Fixed platforms such as PANDAs and surface platforms such as autonomous kayaks may be used as communication and navigation gateways or as sensor nodes. Specially designed sensor and actuator payloads on !STARFISH AUVs may allow environmental surveys to be performed quickly and efficiently. - Target localization using towed arrays: Lightweight towed array technology allows us to tow acoustic sensor arrays using AUVs. We have explored the use of such arrays for target detection, and demonstrated offline tracking of targets. We hope to extend this work to include online distributed tracking of targets using a team of AUVs.
In the STARFISH project, we are interested in collaborative operations using teams of AUVs. Extending this further, we ask if such teams can benefit from emergent behavior or what is often termed as “swarm intelligence”.
Swarm intelligence 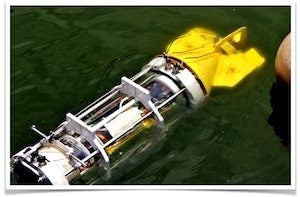 is the collective emergent behavior of decentralised, self-organising systems that typically consist of a population of simple agents interacting locally with one another and with their environment. Although we use the term “swarm” here, our interest is primarily in small swarms (we prefer to call them “teams”) of underwater robots. To explore emergent behavior principles, we need several (10-20) underwater robots. Although the seafaring STARFISH AUVs could conceptually be used for this study, building and operating such a large number of AUVs is challenging. We are therefore developing a number of very simple low-cost underwater robots (called “SwarmBots”) for lake testing.
To test our ideas, we are exploring the use of SwarmBots for acoustic source localization. The SwarmBots run the same C2 system as STARFISH, but are equipped with two basic behaviors:
is the collective emergent behavior of decentralised, self-organising systems that typically consist of a population of simple agents interacting locally with one another and with their environment. Although we use the term “swarm” here, our interest is primarily in small swarms (we prefer to call them “teams”) of underwater robots. To explore emergent behavior principles, we need several (10-20) underwater robots. Although the seafaring STARFISH AUVs could conceptually be used for this study, building and operating such a large number of AUVs is challenging. We are therefore developing a number of very simple low-cost underwater robots (called “SwarmBots”) for lake testing.
To test our ideas, we are exploring the use of SwarmBots for acoustic source localization. The SwarmBots run the same C2 system as STARFISH, but are equipped with two basic behaviors:
is the collective emergent behavior of decentralised, self-organising systems that typically consist of a population of simple agents interacting locally with one another and with their environment. Although we use the term “swarm” here, our interest is primarily in small swarms (we prefer to call them “teams”) of underwater robots. To explore emergent behavior principles, we need several (10-20) underwater robots. Although the seafaring STARFISH AUVs could conceptually be used for this study, building and operating such a large number of AUVs is challenging. We are therefore developing a number of very simple low-cost underwater robots (called “SwarmBots”) for lake testing.
To test our ideas, we are exploring the use of SwarmBots for acoustic source localization. The SwarmBots run the same C2 system as STARFISH, but are equipped with two basic behaviors:
- The target-drive models the hypothesized behavior of a fish-larva searching for a coral reef using limited acoustic cues. This helps a single SwarmBot to adjust its heading roughly towards an acoustic source.
- Group-cohesion mimics schooling of fish (such as golden shiners). The schooling behavior implicitly exchanges information, allowing the team of SwarmBots to find the acoustic source much quicker than any individual is able to.